




Friday, September 8, 2017 - 18:05
Based on feedback from the previous passive sensor integration pass, specifically regarding the towed array, work has been continued on expanding options for remotely deployed sensor platforms.
Sensor Drone Concept
Primarially, this feedback has lead to investigation of utilisation of multiple drones to give similar extension of triangulation receiver base on wider bearings. The benefit of this system over the towed array is that, by deploying multiple drones, the vessel will be able to get much better passive sensor data, accelerating TMA and giving a tactical advantage.
However, the downside is not only an increase in the overall size of the drone body compared to a towed array (taking into account the need for fuel, guidance, and communications not on the towed array) is large, so only a limited number can be carried, with limited endurance and performance. Ie. As they will need to power and manoeuvrer themselves, the drones will not be able to be deployed indefinitely and, without direct access to the fusion plant’s output, nor will they be able to keep up with the vessel’s acceleration.
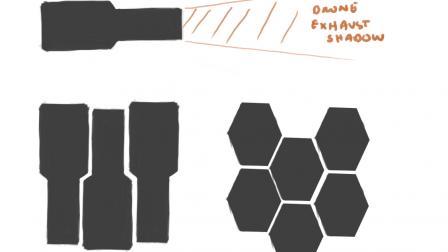
From a tactical perspective also, it is likely the drones will need to utilise a similar drive system to the vessel, albeit smaller and less capable. As such, each drone will likely increase the overall energy emissions of the vessel during manoeuvring with a drone formation deployed, thus making the whole system more susceptible to detection on passive sensors. Additionally, due to the use of similar drive technology, while the drones are set up to give full-sphere passive coverage though, like the vessel, they will suffer sensor degradation aft due to drive wash if accelerating, decelerating, or transiting to station.
There are, however, some options to mitigate, if not eradicate, the downsides of a drone arrangement:
- Drone design has been optimised to increase storage capacity (note that the supply will still be limited however dues to the size of the drone body). As such with a full complement of drones aboard and operationally ready, there should be some ability to rotate them on and off station to maintain coverage for a longer period if required, at least until maintenance can no longer keep up. This also means there are spares available should some be damaged or lost, either by succumbing to fire or should the vessel be unable to recover them for whatever reason (eg. In an ambush situation where the vessel needs to run and abandon the drones).
- The drones are, also equipped with RCS, including aft firing RCS should they need to be deployed whilst minimising energy emissions. Unfortunately this will produce only very low accelerations and thus, if deploying on RCS, it is unlikely the vessel will be able to manoeuvre without writing off any deployed units.
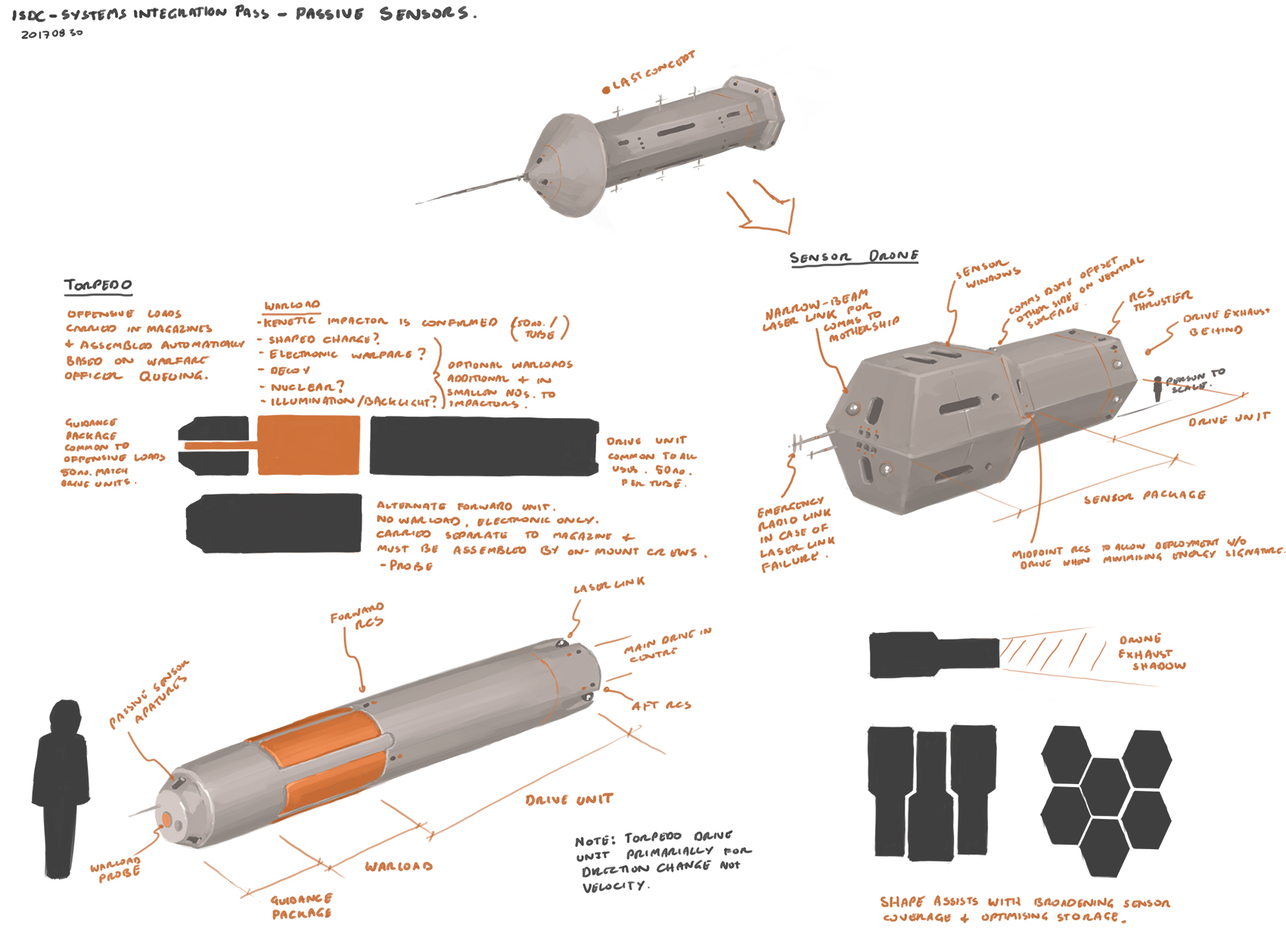 Drone control is via narrow-beam laser link to minimise emissions and also reduce the chances of interception, though a backup radio antenna is also provided for emergencies should the laser system become inoperable. This laser system is also utilised for torpedo fire-control. While this does offer redundancy in the system, frees up hull space, and allows a broader arc across which each torpedo may be linked to the vessel’s fire-control, deployment of a drone formation may also limit the links available for this fire-control, thus limiting the number of salvos able to be stacked in that scenario.
Drone control is via narrow-beam laser link to minimise emissions and also reduce the chances of interception, though a backup radio antenna is also provided for emergencies should the laser system become inoperable. This laser system is also utilised for torpedo fire-control. While this does offer redundancy in the system, frees up hull space, and allows a broader arc across which each torpedo may be linked to the vessel’s fire-control, deployment of a drone formation may also limit the links available for this fire-control, thus limiting the number of salvos able to be stacked in that scenario.
And speaking of torpedoes…
Torpedo Concept
As it is currently envisaged that the narrow-beam, this is perhaps as good of a time as any to start putting forward the preliminary torpedo design. Currently, each attack torpedo is made up of three components which are, for the most part, assembled in the magazine prior in response to the warfare officer’s input torpedo queue for each tube, prior to final inspection by the torpedo room crew and loading. These components are:
- Guidance Package.
- War Load.
- Drive unit.
The Guidance Package is self-explanatory, containing rudimentary active and passive sensors should fire control need to be handed off to local guidance from the vessel’s sensors. Integrated into it are arms which carry control runs around the war load and back to the drive unit. It also incorporates a hollow centre for the war load probe extension.
The warload is the actual offensive component. Currently intended for use as the primary torpedo war load is a superdense kinetic impactor, possibly carrying an integrated or separate penetrator. However, provision has been made for other possibilities should they be required. These might include:
- Shaped charges, in which case the probe will become more critical for instatement of a tandem warhead.
- Electronic warfare packages such as decoys, noisemakers/jammers to be deployed with the torpedo salvo to confuse tracking and point defence.
- Illumination rounds. As it cannot be guaranteed that everything encountered by the crew will show up on their available sensors, it may be worth having a facility which would allow an “illumination round” to be fired behind an object or anomaly of interest which, when detonated, would emit on known spectrums and frequencies, essentially silhouetting the target.
- Tactical Nuclear? (it’s the only way to be sure).
The drive unit is again self-explanatory, containing RCS able to orient the torpedo for vector changes utilising the main drive. The drive unit also houses the fire-control links at its aft.
This component also forms the basis for the torpedo system’s use for the deployment of scientific probes, entailing replacement of the guidance package and war load with a scientific sensor suite and modified guidance system. These would likely be kept separate to the magazine, possibly racked in the torpedo room itself, and manually assembled by the torpedo room crew onto the drive unit prior to launch.
Aside from general broad-spectrum probes, it may be possible to keep a number of empty probe bodies for the science team to outfit with more specialised equipment if required.
It is anticipated that magazines will have capacity for 50no. Torpedoes per tube, a “torpedo” in this case being the guidance package, drive unit, and standard kinetic impactor war load (stored separately in the magazine). Other war load types would be fewer in number and also stored in the magazine for integration in place of the impactor if required.
- 2 comments
- Log in or register to post comments
Comments

Drone Propulsion
The vessel uses magnetoplasma (MIE) drives for main propulsion - that would be definite overkill for drones. But you could get a good mix of fuel compatibility and power/weight ratio with a hydrogen-powered arcjet. The stuff they're using in commercial satellites right now isn't up to much but we've had some (accidental) luck creating powerful arcs by overloading QCD superconductors.
A small hydrogen tank will last you ages so your main contraint will be electrical (battery) power - induction charging while docked should do the trick.
You'll only get about 100KW out of a hyrdogen arcject but that should be enough for station-keeping style manuevering.
Well, on the assumption the
Well, on the assumption the drones will basically be operated similarly to a submarine towed array, then station-keeping should be all we required drive wise. We’ll need to start looking into power storage options and what sort of power density/output we can get from each (battery, capacitor, etc… probably not fuel cell as it risks digging into the vessel’s consumables).
In terms of charging, induction charging is one option though, once a drone is retrieved, it would probably be easy enough to simply plug it in as well. It’s likely a certain degree of maintenance will be required after each sortie (to put it in perspective, a C-17 GlobemasterIII requires on average 20 manhours of maintenance for every hour flown) , so the crew will be there anyway.
Maintenance requirements are likely to be one of the restrictions on drone usage. That’s partly because more hull volume needs to be made available for the more intensive of those procedures to take place, and also as I suspect it would be draining on the crew to maintain that sort of operational tempo for an extended period (ask to anyone who has stood defence watches for a while). Not to mention that, as the drone flight hours go up, you’re going to hit major service points more quickly, which puts more strain on the crew right down the supply line.
On the subject of drives though, any thoughts on those for the torpedoes? I’m a little unsure what we can expect attempting to miniaturise down to that scale as I’m aware even the full scale versions for the vessel itself remain under development. Would be expecting something that could match or better the vessel’s acceleration? Or are they still likely to only be good enough for vector changes once reduced to that size?
Concept Site
Immersive sci-fi and how to join the adventure
Crew Site
Information and tools for ISDC crew members


