

Related

Navigation involves management of the vessel’s movement in space, including superluminal travel between stellar systems and maneuvering the vessel around other vessels and objects at subluminal speeds.
Impulse operations occur at subluminal speeds (below the speed of light). This navigation mode is used for travel within star systems, where the bulk of Endeavour’s exploratory and tactical operations will take place.
Impulse Navigation
For navigation purposes an arbitrary impulse grid is projected around a star system, centered on the system’s principal astronomical object (usually a star) which is referred to the Navigable Astronomical Object (NAO).
The vessel’s position on the impulse grid is calculated once every second.
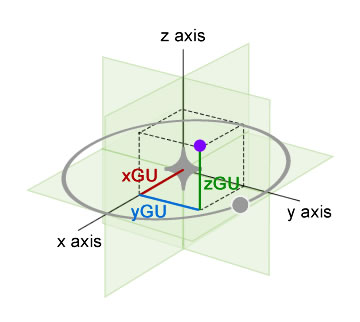
Position
The grid is based on distance from the NAO across X, Y and Z axes represented as Grid Units (GUs), with a distance of 3,000 kilometres between each GU. The vessel’s position is reported as the number of GUs on each axis, in the form of X, Y and Z co-ordinates.
Heading
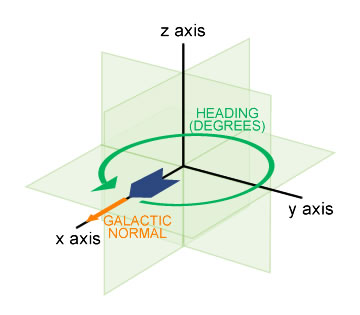
The vessel’s direction of travel is its heading. This is represented as the number of degrees variance from Galactic Normal - the calculated centre of the galaxy (similar to the way Earth’s magnetic poles are used as a reference).
The vessel’s direction is changed by altering the direction of engine thrust.
A change in heading is a bearing, measured in degrees from the current heading.
Course
A navigational course is a series of points in space, each represented by impulse grid co-ordinates (a course point), that the vessel aims to reach before applying the necessary bearing to head towards the next point.
A course may be as simple as a single point where the vessel will stop or enter orbit, or can include serval points, such as a search pattern.
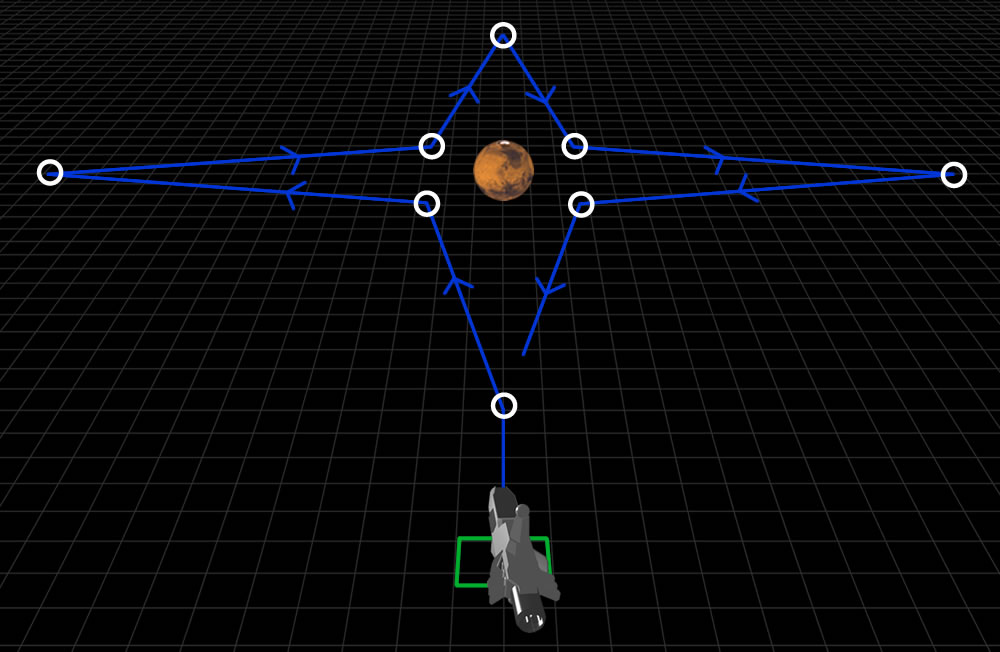
Courses can be pre-plotted by a navigator and overlaid on the vessel’s current position, such as a complex search pattern, or they can be plotted on the fly by ‘drawing’ them on the helm console.
Impulse Maneuvering
Impulse maneuvering involves changing the vessel’s heading and/or speed to follow a course, or for a specific navigational or tactical purpose such as avoiding a hazard or to allow weapons to be fired.
The helm console provides controls to alter speed and heading and provides tools to help calculate the bearings required to reach course points.
Speed
The vessel’s impulse speed is measured as a proportion of light speed (C). Due to the effects of relativistic drag Endeavour’s top speed is estimated at 0.2C (one fifth the speed of light).
The main engines provide thrust to bring the vessel up to its desired speed, after which the engines are powered down and momentum maintains the vessel’s speed.
Slowing or stopping the vessel requires the application of reverse thrust.
Maneuvering Cycle
As the helm console updates the vessel’s current position once every second, the effect of any changes made on the helm console will not become apparent until the next position update. For this reason the period between position updates is referred to as a maneuvering cycle.
Orientation
The position of another object relative to the vessel is its orientation.
Orientation is expressed in a few ways depending on the precision required.
The most precise is to expressed orientation as a bearing - the variance in degrees of the object’s position relative to the vessel’s heading.
Less precise but easier to communicate quickly is to using standard naval terminology to describe the object's position relative to the vessel’s heading.