


Check Button Group Module
 The Check Button intergrid module provides an array of up to eight buttons with check-style toggle functionality: each individual button toggles independently between on and off states.
The Check Button intergrid module provides an array of up to eight buttons with check-style toggle functionality: each individual button toggles independently between on and off states.
Check buttons pass boolean values: off-state is 0 (zero), on-state is 1 (one).
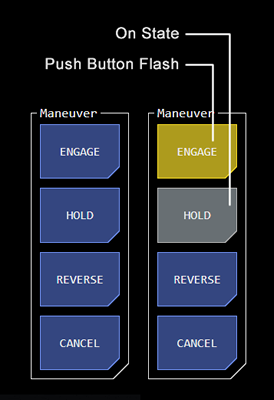
Optionally, individual buttons can be configured as 'push' buttons. Starting at off-state, when pressed the button will update the target with the on-state value, confirming the press by flashing to the alert state before returning to off-state.
The module can be configured to update values within intergrid datasets.
Module Setup
Vessel ID: This is the UID of the vessel being controlled
Mode: Activates the impulse navigation option (See below)
Mode1Pos: If the module is in mode 1, this determines which button is the "Engage" button (for error feedback purposes)
Orient: Button arrays can be oriented vertically or horizontally
Number of Buttons: The number of buttons included in the array (maximum of 9)
Intergrid: The targeted applet instance eg emdarIntergrid
Intergrid Depth: How many data group layers deep in the target value is located
for example, at an Intergrid Depth of 1, the target value would be found within the Intergrid1 group:
{
intergrid1: {
target: "target value"
}
}
Intergrid1: The first group layer (or if no group layers - intergrid depth value of zero - the target value)
Intergrid2: The second group layer
Button Settings
These values may be configured individually for each button in the array.
Target: The target value's label within the dataset
Label: The label of the button as it appears on the console (the label is the same for both on and off states)
Mode: If the push mode option is selected, the button state will not toggle but send the on-state value and flash alert state before returning to on-state.
Flash: The duration of the alert state flash if in push button mode.
Impulse Navigation Option
This module includes an option with specific support for navigation.
If set to mode 1, in addition to its configured button behaviour the module will call the Impulse Navigation module on a recurring basis (once each maneuvering cycle), passing the ID of the configured vessel.
Condition Error Codes
Whichever button is defined as the "Engage" function (ie initiating helm maneuvers) will provide error feedback based on condition codes
Code 0: This resets maneuver status to drive mode
Code 1: This confirms nominal execution of helm maneuver
Code 2: This indicates a general error
Code 3 (No Speed): This is indicates that the vessel does not have sufficient speed (steerage) to perform the requested helm maneuver
Code 4 (Reverse): This indicates that the main engines are in reverse thrust mode and so helm manuevers cannot be performed
Code 5 (Gimbal): This indicates that the engines cannot gimbal sufficiently to achieve the requested bearing
Attachments:
Concept Site
Immersive sci-fi and how to join the adventure
Crew Site
Information and tools for ISDC crew members


