





Impulse Maneuvering

Impulse maneuvering uses the main engines to control acceleration, speed and heading.
Speed
The vessel’s speed is measured in fractions of the speed of light (the abbreviation for which is C). The vessel’s maximum rated speed is 0.2C (one-fifth the speed of light, or approximately 60,000 kilometres per second).
A dead-reckoning system estimates the vessel’s speed based on thrust and range of gyroscopic and other sensors. This is part of the same system that estimates the vessel’s position on the navigation grid. It can be impacted by a range of environmental systems and so does not deliver pin-point accuracy but is considered accurate enough for impulse maneuvering, within +/- 3000Km.
Speed is therefore referred to in more approximate terms for operational purposes. Fractions of ‘impulse speed’ typically provide enough specificity. Full (maximum) impulse represents the vessel’s maximum subluminal speed. Half impulse represents half the vessel’s maximum speed (0.1C).
Drive Mode
Drive Mode involves the application of thrust to accelerate the vessel to a required speed. Heading changes are typically avoided while in at higher rates of acceleration. Depending on the amount of thrust the main engines output significant detectable EM.
Cruise Mode
Once the vessel has reached the required speed, thrust is reduced and the vessel's momentum maintains velocity. This is referred to as Cruise Mode. Almost no detectable EM is output by the engines in this mode.
Thrust
 The helm controls the output of the impulse engines. Altering the amount of power applied to the engines has a corresponding effect on thrust output.
The helm controls the output of the impulse engines. Altering the amount of power applied to the engines has a corresponding effect on thrust output.
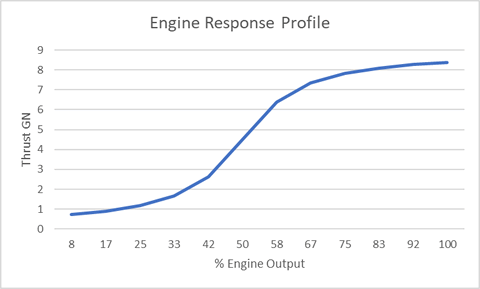
Impulse engines are extremely energy intensive and efficiency varies over their operating range, with most efficient thrust production experienced mid-range.
Thrust is measured in giganewtons (GN). At nominal efficiency the engines output approximately 4.5GN of thrust, with a maximum rated output of 8.25GN.
Reverse Thrust
If the vessel needs to be slowed or stopped, then reverse thrust must be applied using plasma diverters and forward-facing impulse outlets which counteract the vessel’s forward momentum.
Reverse thrust is applied less efficiently due to the plasma diversion process and the smaller profile of the reverse thrusters.
Acceleration
Drive Mode applies engine thrust to accelerate the vessel to a desired speed. When this is reached thrust is reduced, allowing the vessel’s momentum to maintain speed.
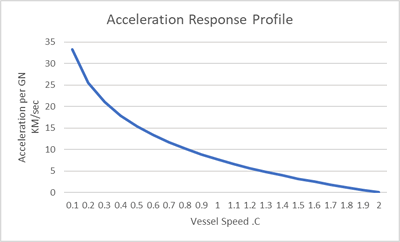
While thrust is applied the vessel will continue to accelerate, subject to environmental or relativistic factors (see below).
1GN of thrust delivers acceleration of approximately 33Km/sec2 at 0.01C.
Relativistic Drag
 The vessel’s acceleration and maximum speed is limited by relativistic factors. Relativity holds that at the speed of light the vessel’s mass would be infinite (requiring infinite energy to propel it) which is why the space-warping technology of the superluminal engines is required for faster-than-light travel.
The vessel’s acceleration and maximum speed is limited by relativistic factors. Relativity holds that at the speed of light the vessel’s mass would be infinite (requiring infinite energy to propel it) which is why the space-warping technology of the superluminal engines is required for faster-than-light travel.
This means that as the vessel approaches the speed of light its relative mass increases, a process referred to as relativistic drag. At higher speeds more thrust is therefore required to provide the same amount of acceleration, until maximum thrust is reached and no further acceleration is possible.
Relativistic drag does not become noticeable until speeds of approximately .001C
Heading
 To achieve heading changes, the output of the main engines magnetically gimballed, applying thrust at an angle to the current direction of travel. This causes the vessel to change direction. This is an extremely efficient way of altering heading given the vessel’s mass and momentum, although velocity (how much space is needed to complete the maneuver) must be carefully managed to avoid stress on the vessel's spaceframe.
To achieve heading changes, the output of the main engines magnetically gimballed, applying thrust at an angle to the current direction of travel. This causes the vessel to change direction. This is an extremely efficient way of altering heading given the vessel’s mass and momentum, although velocity (how much space is needed to complete the maneuver) must be carefully managed to avoid stress on the vessel's spaceframe.
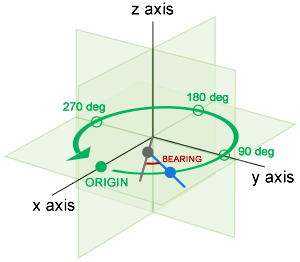
A heading change is defined by the desired change in direction of travel (the bearing) and the vessel's current speed. The system estimates the impact of the chosen bearing on the vessel's heading and maneuver stresses (see below), before the maneuver is engaged by the quartermaster.
Leeway
Applying directional thrust to turn the vessel on its X, Y and Z axes requires the vessel to be moving along those axes to complete the maneuver. This incidental movement is referred to as leeway.
Higher vessel speeds when undertaking a maneuver will increase leeway.
Relationship with Drive and Cruise Mode
Applying thrust against the vessel's axes of travel for maneuvering purposes applies stress to the vessel's spaceframe. These stresses are magnified by the speed and acceleration of the vessel. Maneuvering the vessel at high speeds or at high rates of acceleration risks damage to the spaceframe or overloading of inertial dampening systems.
EM Output
The gimballing system requires main engine thrust to acheive a heading change, which means the vessel will ouput detectable EM for the duration of the maneuver even when in cruise mode (see below).
Orbital Plane Alignment
Navigation best-practise recommends that vessels align their orientation to a star system's orbital plane. This provides a frame of reference for maneuvering and minimises disorientation especially for crew without extensive navigational experience.
For this reason most helm maneuvers occur along X and Y axes only.
Categories:
Concept Site
Immersive sci-fi and how to join the adventure
Crew Site
Information and tools for ISDC crew members


